



Applications
Ballades et decouvertes
Tout d’abord, ajouts de la gestion du GPS
Le GPS peut servir en DTO (Direct To). On choisit in way point et on a une flèche qui nous indique ou il est. On a aussi la distance. En mode DTO (obs dans la logique de Flightgear), on peut aussi l’utiliser comme un VOR, avec des radiales. Le GPS peut alors être utilisé dans le CDI ou en BRG1 ou BRG2.

Le GPS peut aussi être utilisé pour suivre un plan de vol (Flight plan). Le flight plan est géré et créé par Flightgear (ce n’est pas le zkv1000 qui fait ca, c’est moins ergonomique ...). Le GPS (CDI, BRG1 ou BRG2) suit alors les waypoints ...

Ajout du suivi de terrain. Le suivi de terrain affiche une carte avec des codes couleurs :
![]() noir = pas de danger, le sol est a plus de 1000 pieds
noir = pas de danger, le sol est a plus de 1000 pieds
![]() jaune = attention, le sol est entre 1000 et 100 pieds en dessous
jaune = attention, le sol est entre 1000 et 100 pieds en dessous
![]() rouge = danger, le sol est a moins de 100 pieds en dessous , voir au dessus : risque de collision.
rouge = danger, le sol est a moins de 100 pieds en dessous , voir au dessus : risque de collision.
Ce suivi de terrain est basé sur le travail de Skyop (on peut voir un affichage du terrain sur son A340-300). Attention, en haute résolution, ça consomme pas mal de temps CPU ... Bref, ça lag ...

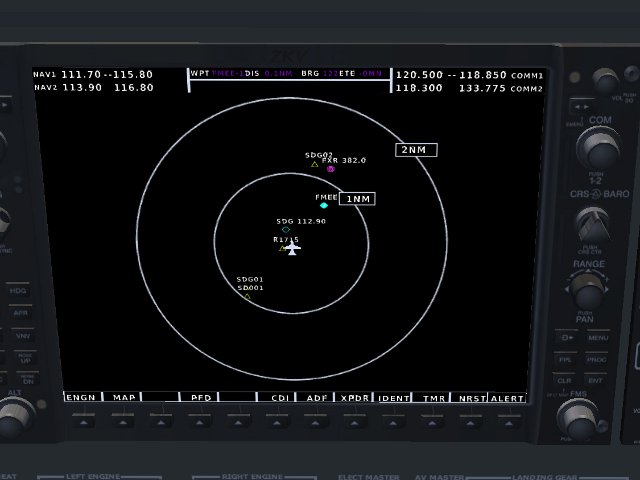
Ajout de l’affichage des navaids. Cet affichage existe dans le vrai G1000 mais il est combiné avec d’autres paramètres a afficher. Dans le zkv1000, pour des raisons de lisibilité (tout le monde n’a pas d’écran de 50 pouces a la maison !!!). Donc, on a cet affichage, avec possibilité d’afficher ou de masquer les aéroports, les vor, les ndb et les fix.
Voici un lien de téléchargement : ici . Vous trouverez le paint kit de Patten qui m’a permis de faire ma livrée favorite ... ;-)

Promis, je m’attelle à un mode d’emploi du zkv1000 !!!